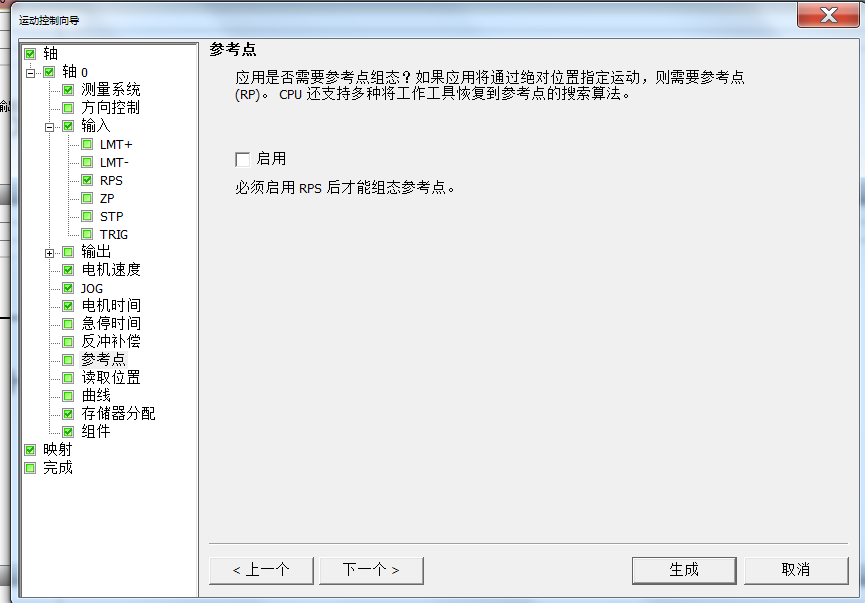
1、在smaRT运动控制子程序中调用了AXIAO_GOTO,整个程序中没有调用AXIAO_RSEEK,但是,出现了错误代码19,说是RP_FAST值非法,检查运动控制向导,压根都没有没有组态回原点程序呢,根本都没有使用RP_FAST。这个问题如何解决呢?
图片说明:
 4873450647761bb98a092266ddb4dfCE
4873450647761bb98a092266ddb4dfCE 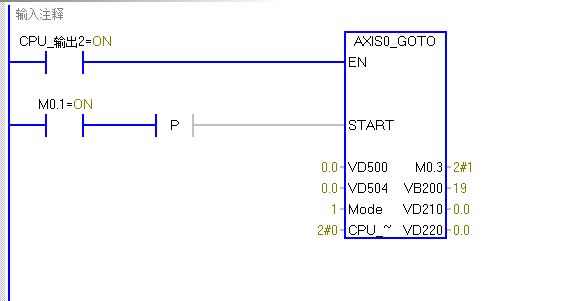
![SMART运动控制子程序]()
最佳答案
需要先初始化轴,即,在调用其他运动控制命令之前,首先调用AXISO_GOTO。这是运动控制的基本原则。
提问者对于答案的评价:
谢谢
专家置评
请参考wingfly及Sandzhao两位工程师的回答