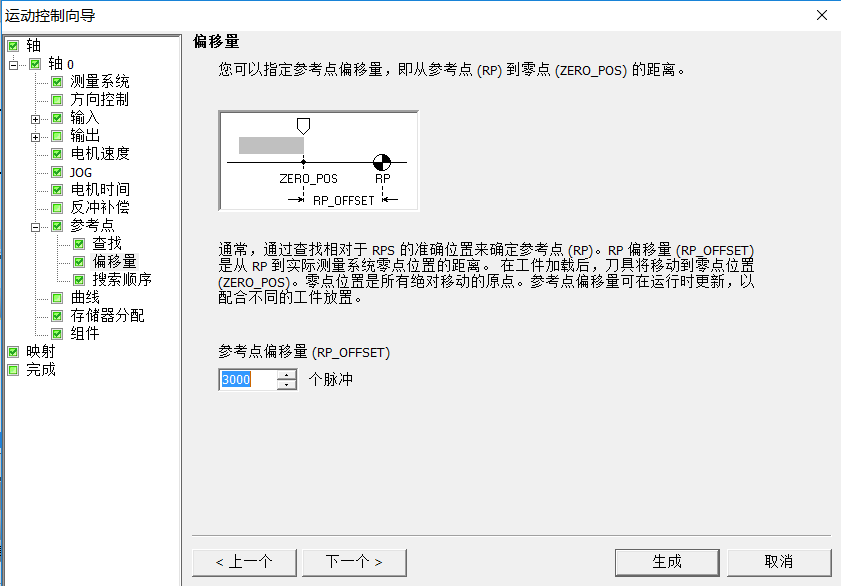
1.偏移量
个人理解:根据对字面的理解,只要设定了“参考点偏移量”,使用“RSEEK”(回原点)指令,当设备找到原点后,会根据设定的“参考点偏移量”的值,再运动到设定的偏移值位置。
但是实际使用中并不和我描述的一样,不管有没有设定“参考点偏移值“,回到原点的位置都是一样的。是我在理解上出了问题,还是没有使用对指令。
2.搜索顺序
其中模式1(参考点是在从工作区域侧逼近时RPS输入激活的位置),模式2(参考点“RP”位于RPS输入激活区域的中心)。这两个模式都可以很好的应用。但是在设置到模式3和模式4时。整个程序就不能动了,”RSEEK”(回原点指令)和”MAN“(手动控制)都动作不了了没反应。想问一下各位,在设置模式3或模式4时是不是还有什么特别的步骤需要设置的,还是需要用别的指令来控制。
图片说明:
 7e7613f8f11DA4b6a96e810a3903a09a
7e7613f8f11DA4b6a96e810a3903a09a 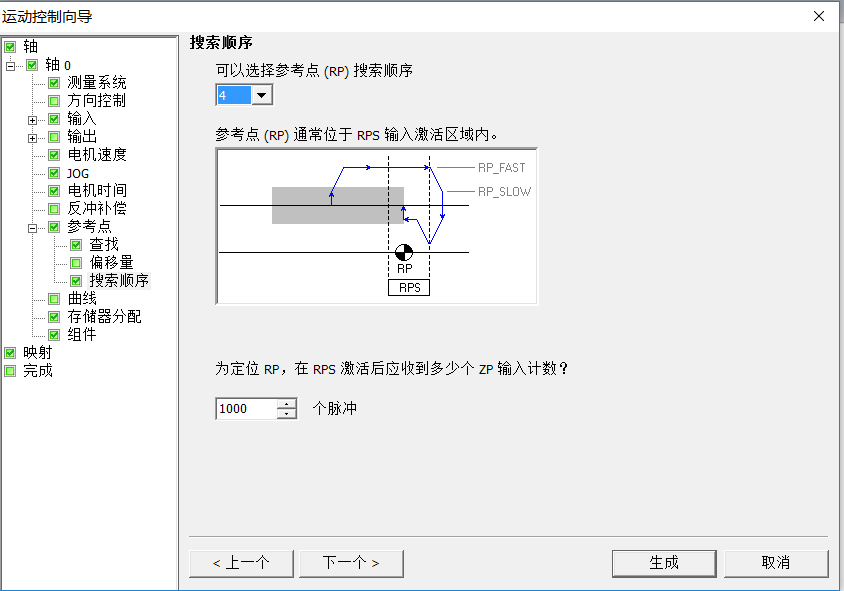 95518ebb3106064FC4079107f9e27a60
95518ebb3106064FC4079107f9e27a60
最佳答案
需要使用零脉冲参考点ZP配合使用
提问者对于答案的评价:
感谢各位网友的回答,结果正如我采纳答案的这位网友所说的一样。我在选项时粗心大意没有注意到一些细节的提示导致了误解。
专家置评
已阅,最佳答案正确。