STyle="font-size:15px;">变频器是一种静止的频率 变换器,可将电网电源的50Hz频率交流电变成频率可调的交流电,作为电动机的电源装置,目前在国内外使用广泛。使用变频器可以节能、提高产品质量和劳动生产率等。本课题体介绍与变频器相关的知识:变频器的基本原理、变频器常用开关器件(IGBT)、脉宽调制(PWM)型逆变电路、变频调速的特点以及变频器的应用。
一、本课题学习目标与要求
1. 了解变频器的发展和应用。
2. 掌握变频器的基本工作原理。
3. 初步熟悉变频器的参数设置。
4. 掌握IGBT器件的基本原理及常用的驱动保护电路的原理。
5. 掌握脉宽调制(PWM)型逆变电路工作原理。
二、主要概念提示及难点释疑
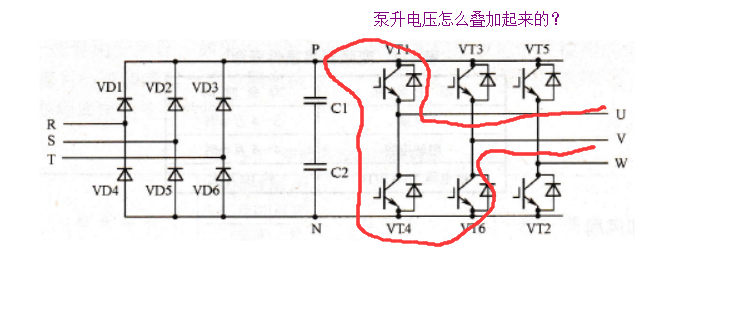
1.变频器的组成及工作原理
变频器通常由主电路、控制电路和保护电路组成。
主电路如图6-1所示。
图6-1 变频器主电路图
2.电压型和电流型变频器
电压型变频器和电流型变频器的区别仅在于中间直流环节滤波器的形式不同,但是这样一来,却造成两类变频器在性能上相当大的差异,主要表现列表6-1比较如下:
表6-1 电压型变频器与电流型变频器的性能比较
特点名称
电压型变频器
电流型变频器
储能元件
电容器
电抗器
输出波形的特点
电压波形为矩形波
电流波形近似正弦波
电流波形为矩形波
电压波形为近似正弦波
回路构成上的特点
有反馈二极管
直流电源并联大容量
电容(低阻抗电压源)
电动机四象限运转需要再生用变流器
无反馈二极管
直流电源串联大电感
(高阻抗电流源)
电动机四象限运转容易
特性上的特点
负载短路时产生过电流
开环电动机也可能稳定运转
负载短路时能抑制过电流
电动机运转不稳定需要反馈控制
3.绝缘门极晶体管(IGBT)
IGBT的驱动原理与电力MOSFET基本相同,它是一种压控型器件。其开通和关断是由栅极和发射极间的电压UGE决定的,当UGE为正且大于开启电压UGE(th)时,MOSFET内形成沟道,并为晶体管提供基极电流使其导通。当栅极与发射极之间加反向电压或不加电压时,MOSFET内的沟道消失,晶体管无基极电流,IGBT关断。
4.脉宽调制(PWM)型逆变电路
PWM控制的基本原理:在采样控制理论中有一个重要结论:冲量(脉冲的面积)相等而形状不同窄脉冲(如图6-22所示),分别加在具有惯性环节的输入端,其输出响应波形基本相同,也就是说尽管脉冲形状不同,但只要脉冲在面积相等,其作用的效果基本相同。这就是PWM控制的重要理论依据。
5.变频后异步电动机的机械特性
变频后异步电动机的机械特性如图6-2所示。
图6-2
6.变频器的控制方式
V/F控制:是一种比较简单的控制方式。它的基本特点是对变频器的输出电压和频率同时进行控制,通过提高U/f比来补偿频率下调时引起的最大转矩下降而得到所需的转矩特性。采用 V/F控制方式的变频器控制电路成本较低,多用于对精度要求不太高的通用变频器。
转差频率控制方式:是一种对V/F控制的一种改进。在采用这种控制方式的变频器中,电动机的实际速度由安装在电动机上的速度传感器和变频器控制电路得到,而变频器的输出频率则由电动机的实际转速与所需转差频率的和自动设定,从而达到在进行调速控制的同时,控制电动机输出转局的目的。
矢量控制的基本思想:是将异步电动机的定子电流在理论上分成两部分:产生磁场的电流分量(磁场电流)和与磁场相垂直、产生转矩的电流分量(转矩电流),并分别加以控制。
三、学习方法
1.类比法:变频后机械特性与调压、变极、转子回路串电阻等调速后机械特性类比来学习;IGBT与MOSFET类比;电压型和电流型类比。
2.定性分析法:机械特性、V/F控制可采用将问题具体化来分析。如:机械特性找几个特殊的点,描出曲线的大致轮廓再进行分析。
3.理论联系实际法:将身边应用变频器的实例联系起来理解和分析。
4.讨论分析法:读者要学习与他人讨论分析问题,并了解其他读者的学习方法和学习收获,提高学习效率。
5.问题法:提出相关问题,通过查找资料或询问同学、老师解决问题,达到知识的提升。
四、典型题解析
例6-1 IGBT在实际应用中要采取哪些保护措施?
解:(1)过流保护:通过检测出的过电流信号切断门极信号,使IGBT关断。
(2)过压保护:设置吸收电路可抑制过电压并限制电压上升率。
(3)过热保护:利用温度传感器检测出IGBT的壳温,当超过允许值时令主电路跳闸。
例6-2 KGPS-1000-1.0型中频电源,要求最大直流电流为250A,最大直流电压为510V。
试求:
(1)换向重叠时间。
(2)触发引前时间。
(3)中频电流、电压和输出功率。
(4)选择逆变晶闸管。
解:(1)换向重叠时间的tγ计算
近似认为换向期间电流线性变化,则
,
若管子允许电流上升率di/dt=20A/μs,最大直流电流以250A计算,则
与1000Hz中频周期T=1000μs相比,可忽略换流时间,近似认为电流是矩形波。
(2)触发引前时间tf的计算
取快速晶闸管的关断时间tq为65μs,K取1.5,得
tf=tγ+Ktq=12.5μs+1.5×65μs=110μs
其对应的功率因数角φ=37.3°,实际上工作在40°左右。
(3)中频电流、电压和输出功率的计算
忽略换相重叠时间tγ,则中频负载电流ia为交变矩形波,用傅氏级数展开可得
上式中基波电流有效值为
忽略逆变电路的功率损耗,则逆变电路输入的有功功率即直流功率等于输出的基波功率(高次谐波不产生有功功率)即Pa=UdId=UaIacosφ,将式代入可得
所以
若tf整定在110μs,对应cosφ=0.79,UdM以500V计算,代入式得到最大中频电压
中频输出功率为
式中 Rf——对应于某一逆变角φ时,负载阻抗的电阻分量。
将式代入上式,得到
由上式可见,调节直流电压Ud或改变逆变角φ,都能改变中频输出功率的大小。
(4)逆变晶闸管的计算
中频最大有效电压Ua以750V计,逆变晶闸管额定电压为
通常选用1800V的KK型快速晶闸管,或用两只1000V晶闸管串联并采取均压措施。
额定电流,由于逆变桥中电流为矩形波,所以,IT=0.707IdM,电流选用200A,管子型号为KK200-18。
例6-3 某负载,阻转矩为89N·m;要求转速为375r/min;消耗功率为3.5kW。选用4极异步 电动机,试比较在不同传动比下,所需电动机的容量。
假设电动机具有硬特性,即
解:(1)λ=1
1)电动机的转速及工作频率
转速:因为λ=1,所以:
工作频率因为P=2、s=0,所以:
2)电动机的转矩
因为λ=1,所以:电动机轴上的转矩等于负载的阻转矩:
3)电动机的容量
PMN=13.98kW
选用的PMN=15kW电动机,比负载功率大了4.28倍。
(2)λ=2
1)电动机的转速及工作频率
转速:因为λ=2,所以:
工作频率因为P=2、s=0,所以:
2)电动机的转矩
因为λ=2,所以:电动机轴上的转矩等于负载的阻转矩:
即电动机轴上所需转矩减小了一半,但仍比负载功率大2.14倍。
3)电动机的容量
选用的PMN=7.5kW电动机,可见,当传动比加大为2时,所需电动机的容量减小了一半。
(3)λ=4
1)电动机的转速及工作频率
转速:因为λ=4,所以:
工作频率 明显的是,因为电动机的转速等于额定转速,所以,其工作频率也必等于额定频率:
2)电动机的转矩
因为λ=4,所以:电动机轴上的转矩等于负载的阻转矩:
即电动机轴上所需转矩又减小了一半
3)电动机的容量
选用的PMN=3.7kW电动机。可见,所需电动机的容量又减小了一般,与负载功率吻合。这已经是最优化的结果了,从能量的角度看,电动机容量已不可能再减小。
(4)λ=8
1)电动机的转速及工作频率
转速:因为λ=8,所以:
工作频率
2)电动机的转矩
因为λ=8,所以:电动机轴上的转矩等于负载的阻转矩:
但是当电动机的工作频率超过额定频率一倍时,其有效转矩将减小一半。换言之,电动机的额定转矩时有效转矩的二倍:
TMN=2TMX=22.5Nm
和λ=4相比较,电动机所需转矩并未减小。
3)电动机的容量
因为电动机的额定转速和额定转矩都和λ=4时相同,故所选电动机的容量也一样:
选用的PMN=3.7kW电动机。
可见,继续增大传动比,不再能减小电动机的容赖宁嘎,反而增加了设备投资和传动机构的损失。